3.11. ROS 2 Router configuration with Forwarding Routes¶
3.11.1. Background¶
eProsima ROS 2 Router, a.k.a DDS Router, is an end-user software application that enables the connection of distributed ROS 2 networks (see the ROS 2 Router documentation here). That is, ROS 2 nodes such as publishers and subscriptions, or clients and services, deployed in one geographic location and using a dedicated local network will be able to communicate with other ROS 2 nodes deployed in different geographic locations on their own dedicated local networks as if they were all on the same network through the ROS 2 Router.
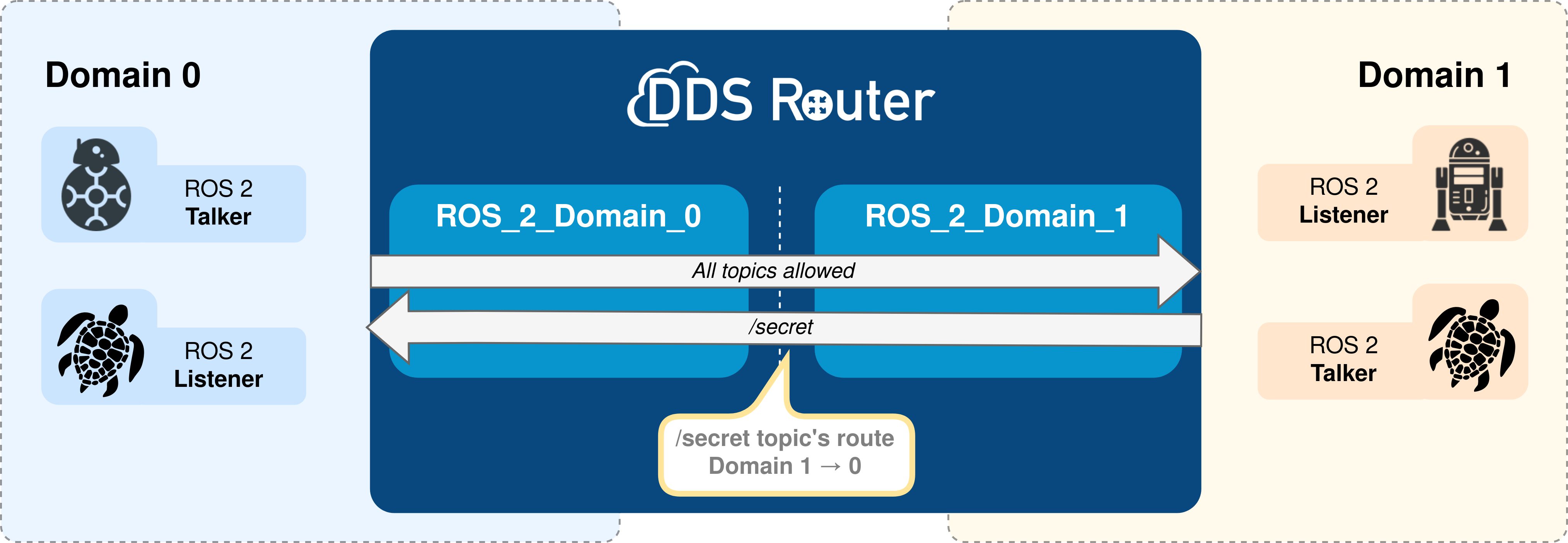
This tutorial explains how to configure a ROS 2 Router with forwarding routes. In particular, we will configure two participants in different domains and communicate them with a ROS 2 Router. The ROS 2 Router will have two forwarding routes, one generic and one specific to a topic. These routes will allow us to define what participants can subscribe to the data that another participant is publishing. This configuration can be useful when a participant wants to send sensible data over a ROS 2 Router to a subset of participants.
Note
This tutorial is similar to the Change ROS 2 Domain Id tutorial, since we will launch a talker and a listener on different domains and connect them with a ROS 2 Router. The difference between both tutorials is that, in this one, we will set up forwarding routes to limit which participants can receive data.
The DDS protocol defines Domain Id as a parameter for every DomainParticipant. Different entities in different Domain Ids will never discover each other, and thus they will not communicate with each other. The ROS 2 Router can be used as a bridge between ROS 2 Domains, so that every node in a domain can communicate with every other node on another domain, as illustrated in the following figure:
This tutorial will use the demo_nodes_cpp package, available in the Vulcanexus Desktop distribution.
Two ROS 2 nodes, a talker and a listener, will be launched on different ROS 2 Domains, so that they cannot communicate between each other.
Then, the ROS 2 Router will be used as a bridge between the two Domains, allowing the listener to receive the messages from the talker.
3.11.2. Prerequisites¶
To proceed, please install Vulcanexus with one of the following installation methods:
3.11.3. Deploying a ROS 2 Router¶
To deploy the ROS 2 Router, we need to create its configuration file.
3.11.3.1. Configuration¶
The following YAML configuration file configures a ROS 2 Router with two Simple Participants in domains 0 and 1, and establishes forwarding routes between them.
Note
This configuration enables listeners in domain 1 to subscribe to messages published in domain 0 for any topic.
It also enables listeners in domain 0 to subscribe to messages published in domain 1 only for the topic secret.
version: v4.0
participants:
- name: ROS_2_Domain_0
kind: local
domain: 0
- name: ROS_2_Domain_1
kind: local
domain: 1
routes:
- src: ROS_2_Domain_0
dst:
- ROS_2_Domain_1
- src: ROS_2_Domain_1
topic-routes:
- name: rt/secret
type: std_msgs::msg::dds_::String_
routes:
- src: ROS_2_Domain_1
dst:
- ROS_2_Domain_0
- src: ROS_2_Domain_0
3.11.3.1.1. Simple Participants¶
The Simple Participants are configured with a name, a kind (local), and a domain id (0 and 1).
participants:
- name: ROS_2_Domain_0
kind: local
domain: 0
- name: ROS_2_Domain_1
kind: local
domain: 1
3.11.3.1.2. Generic Forwarding Routes¶
We define the generic forwarding routes under the tag routes.
This route is configured so that ROS_2_Domain_1 can subscribe to the data published by ROS_2_Domain_0.
- src: ROS_2_Domain_0
dst:
- ROS_2_Domain_1
This route is configured so that ROS_2_Domain_1 does not publish the data it receives.
Thus, a subscriber in domain 0 would not receive the data published in domain 1.
- src: ROS_2_Domain_1
3.11.3.1.3. Topic Forwarding Routes¶
We define the topic forwarding routes under the tag topic-routes by declaring the topic’s name, type, and routes.
topic-routes:
- name: rt/secret
type: std_msgs::msg::dds_::String_
routes:
Note
The type tag is required.
The topic forwarding route will not be set for a topic with the same name but a different type.
Then, we declare the route for each participant.
Warning
When a topic forwarding route is defined for a specific topic, the generic forwarding route gets completely ignored and the topic forwarding route is used instead.
This route is configured so that ROS_2_Domain_0 will subscribe to the data published by ROS_2_Domain_1 on topic secret.
- src: ROS_2_Domain_1
dst:
- ROS_2_Domain_0
This route is configured so that ROS_2_Domain_0 does not forward the data it receives on topic secret.
- src: ROS_2_Domain_0
3.11.3.2. Running the ROS 2 Router¶
Run the DDS Router with the configuration file available at <path/to/file>/ros_2_router_with_forwarding_routes.yaml.
ddsrouter --config-path <path/to/file>/ros_2_router_with_forwarding_routes.yaml
The output from the ROS 2 Router should be something like:
Starting DDS Router Tool execution.
DDS Router running.
If so, the ROS 2 Router has started correctly and it is currently running.
In order to close the execution, press ^C or send a signal (SIGINT 2 or SIGTERM 15) to close it.
3.11.4. Deploy ROS 2 nodes¶
Let us start by running the ROS 2 talker and listener nodes.
3.11.4.1. Environment setup¶
To run the nodes, we need to set up the Vulcanexus environment so that the demo_nodes_cpp package is available.
There are two ways to achieve this:
Running the Vulcanexus Docker image.
Run the Vulcanexus Docker image by executing:
docker run -it ubuntu-vulcanexus:humble-desktop
And then, source the Vulcanexus installation by executing (inside the container):
source /opt/vulcanexus/humble/setup.bash
Setting up a development environment on the local host.
To do this, the
vucanexus-humble-desktoppackage is needed, since it includes all the simulation tools, demos, and tutorials.Set up the Vulcanexus environment by executing:
source /opt/vulcanexus/humble/setup.bash
3.11.4.2. Running ROS 2 nodes¶
3.11.4.2.1. Publish in domain 0 and subscribe in domain 1¶
Run a ROS 2 demo_nodes_cpp talker on domain 0:
ROS_DOMAIN_ID=0 ros2 run demo_nodes_cpp talker
Run a ROS 2 demo_nodes_cpp listener on domain 1:
ROS_DOMAIN_ID=1 ros2 run demo_nodes_cpp listener
Since the ROS 2 Router has a generic forwarding route from domain 0 and 1, it will forward messages from the publisher in domain 0 to the subscriber in domain 1, that will print them in stdout.
3.11.4.2.2. Publish in domain 1 and subscribe in domain 0¶
Run a ROS 2 demo_nodes_cpp talker on domain 1:
ROS_DOMAIN_ID=1 ros2 run demo_nodes_cpp talker
Run a ROS 2 demo_nodes_cpp listener on domain 0:
ROS_DOMAIN_ID=0 ros2 run demo_nodes_cpp listener
Since the ROS 2 Router does not have a generic forwarding route from domain 1 and 0, it will not forward messages from the publisher in domain 1 to the subscriber in domain 0.
3.11.4.3. Running ROS 2 nodes on topic secret¶
3.11.4.3.1. Publish in domain 0 and subscribe in domain 1 on topic secret¶
Run a ROS 2 demo_nodes_cpp talker on domain 0:
ROS_DOMAIN_ID=0 ros2 run demo_nodes_cpp talker --ros-args -r chatter:=secret
Run a ROS 2 demo_nodes_cpp listener on domain 1:
ROS_DOMAIN_ID=1 ros2 run demo_nodes_cpp listener --ros-args -r chatter:=secret
Since the ROS 2 Router does not have a topic forwarding route on topic secret from domain 0 and 1, it will not forward messages from the publisher in domain 0 to the subscriber in domain 1.
3.11.4.3.2. Publish in domain 1 and subscribe in domain 0 on topic secret¶
Run a ROS 2 demo_nodes_cpp talker on domain 1:
ROS_DOMAIN_ID=1 ros2 run demo_nodes_cpp talker --ros-args -r chatter:=secret
Run a ROS 2 demo_nodes_cpp listener on domain 0:
ROS_DOMAIN_ID=0 ros2 run demo_nodes_cpp listener --ros-args -r chatter:=secret
Since the ROS 2 Router has a topic forwarding route on topic secret from domain 1 and 0, it will forward messages from the publisher in domain 1 to the subscriber in domain 0, that will print them in stdout.