
6. micro-ROS Documentation¶
micro-ROS is the default embedded toolkit for ROS 2 and Vulcanexus. It provides a complete set of tools, frameworks and APIs for deploying applications in microcontrollers (MCU) with full support for ROS 2 communications paradigms: Nodes, Publication/Subscription, Services, etc.
micro-ROS targets MCUs with 32 bit architectures and at least 32 kB of RAM, providing support for most popular RTOSes and bare metal systems. With this in mind, micro-ROS aims to be as lightweight and versatile as possible, with a wide set of configurable parameters to tune the application memory usage and timing requirements.
micro-ROS also targets hard real-time environments, giving the user control over:
Memory usage, achieving zero dynamic memory usage at runtime.
Timing of each operation to achieve deterministic behavior.
Execution order of the operations.
micro-ROS is transport agnostic. With its default middleware (eProsima Micro XRCE-DDS) it is possible to run micro-ROS on top of almost any transport layer that supports a package or stream communication paradigm: TCP/IP or UDP/IP stacks, UART devices, CAN/FD buses, SPI, radio links, etc.
This documentation is structured as follows:
Tutorials about micro-ROS can be found at micro-ROS tutorials.
Architecture
micro-ROS follows an architecture that is based on ROS 2, but also has significant differences that allows the embedded integration. In order to ease the use, it also provides tools for handling the integration in embedded platforms.
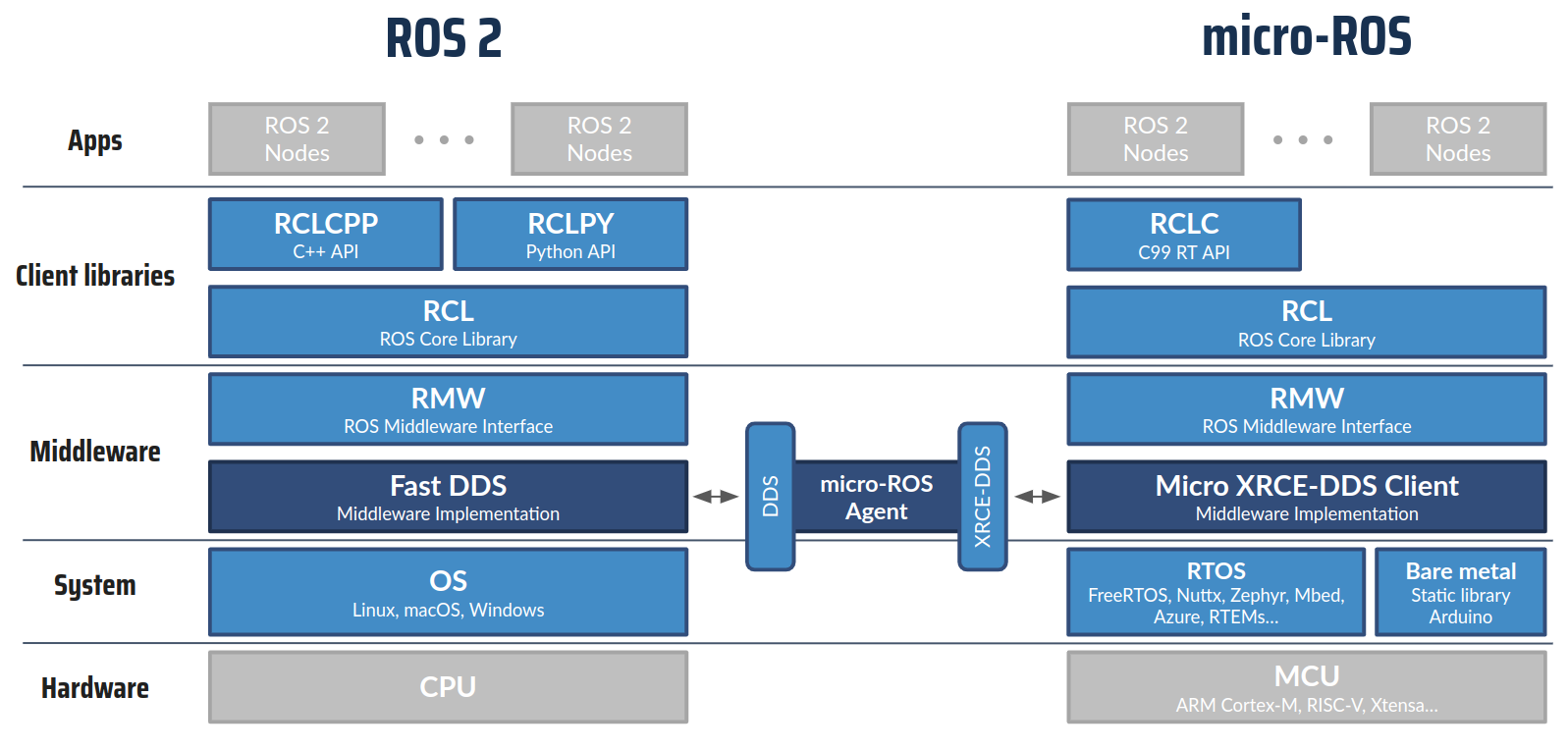
micro-ROS layered architecture abstracts the OS/RTOS with a middleware layer. On top of the middleware, micro-ROS uses the same ROS 2 core layers (RMW, RCL and RCUTILS). With respect to user APIs, micro-ROS provides a C99 API named RCLC that allows using all the concepts available on ROS 2 C++ or Python APIs (RCLCPP or RCLPY).
Compatibility with ROS 2 type support is also granted, meaning that any message definition used in ROS 2 can be used seamlessly in micro-ROS. By means of the micro-ROS build systems, any .msg, .srv or .action definition file can be integrated in the micro-ROS build in order to achieve a type interoperability with ROS 2.
Middleware
In the case of micro-ROS, the default middleware layer is eProsima Micro XRCE-DDS, a lightweight, portable, with minimal overhead middleware based on the OMG DDS-XRCE standard.
The micro-ROS default middleware is compound of two parts: the Micro XRCE-DDS Client that runs in the MCU side, and the Micro XRCE-DDS Agent that runs in the ROS 2 side and communicates the embedded side with the ROS 2 dataspace. The eProsima Micro XRCE-DDS is the base package for the micro-ROS Agent, a package that extends the former with specific ROS 2 features such as graph management.
Note
micro-ROS Agent is distributed along with Vulcanexus Micro. Check the installation tutorial.
In the same way as ROS 2, micro-ROS has a pluggable middleware interface so other middleware implementations can be used at the bottom layer of the stack.
Build Systems
micro-ROS provides a set of tools for integrating it in many build systems, toolchains and embedded development frameworks. Those packages are heterogeneous due to the diversity of tools used by different vendors.
In general, micro-ROS provides standalone solutions for most used RTOSes and environments such as: Zephyr RTOS, Espressif ESP-IDF, FreeRTOS, Microsoft Azure RTOS, etc. It also provides packages for integrating it in major vendor tools: Renesas e2 Studio or STM32 Cube IDE/MX.
Finally micro_ros_setup is a package that provides simple scripts for navigating the micro-ROS support packages.
micro_ros_setup is distributed along with Vulcanexus Micro.
Check the installation tutorial.
Note
For the full understanding of this build system approach please refer to the Build System Components reference.